В этой записи я постараюсь максимально доступно расписать шаги по установке и настройке замечательного автопилота и OSD - PitLab
по мере наличия времени и возможности я буду по тиху наполнять эту запись.
ссылка на скачивание документации: тык
На данный момент у Питлаба достаточно инструкций, в том числе и на русском языке. Возможно они слегка разобщены и в целом не описывают процесс с ноля, но все необходимые действия в них описаны.
предупреждение: Автопилот не нуждается в калибровке, все необходимые настройки сделаны изготовителем. Процедура калибровки необходима исключительно при видимых нарушениях в работе. (в дальнейшем действия по калибровке будут описаны)
Процесс инсталляции включает в себя:
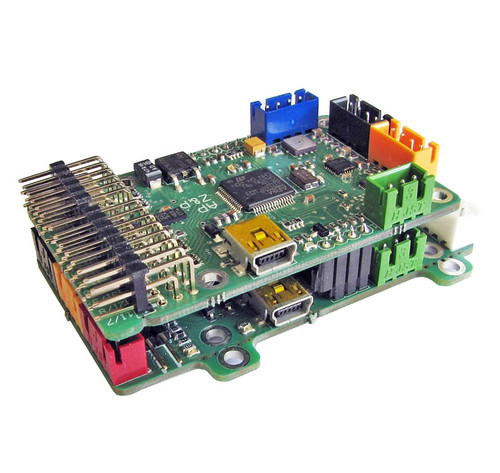
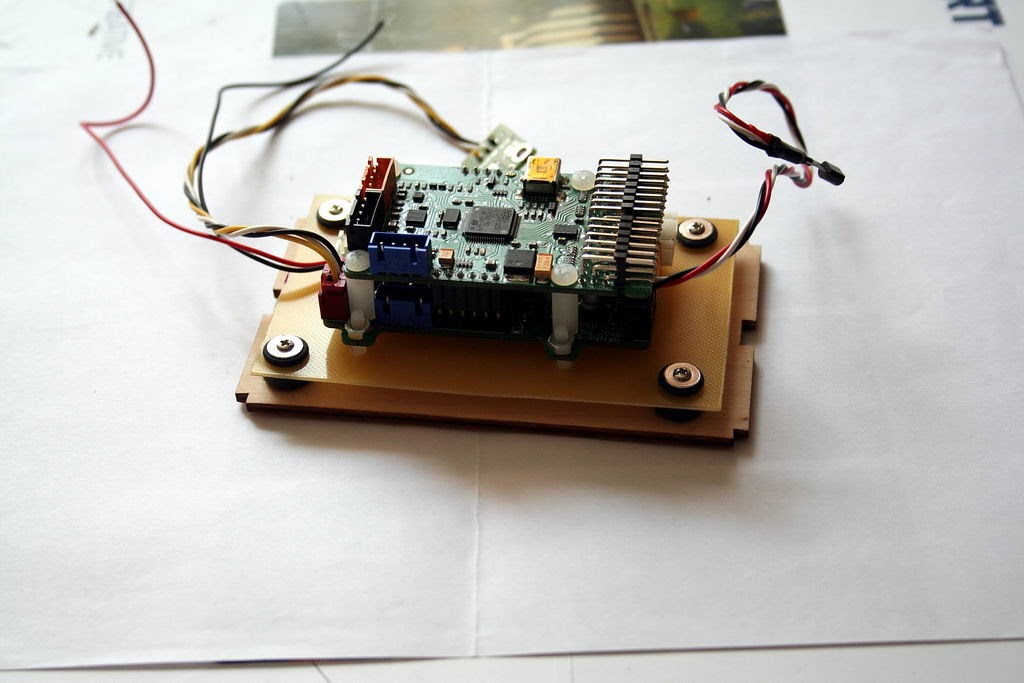
1. установку АП в самолёт
желательна вибро-развязка
АП на экране OSD отображает вибрации, допустимая цифра до 2g! (но лучше вообще не видеть этих цифр), если она больше, следует уделить внимание балансировке винтов и виброразвязке АП.
Кликабельно
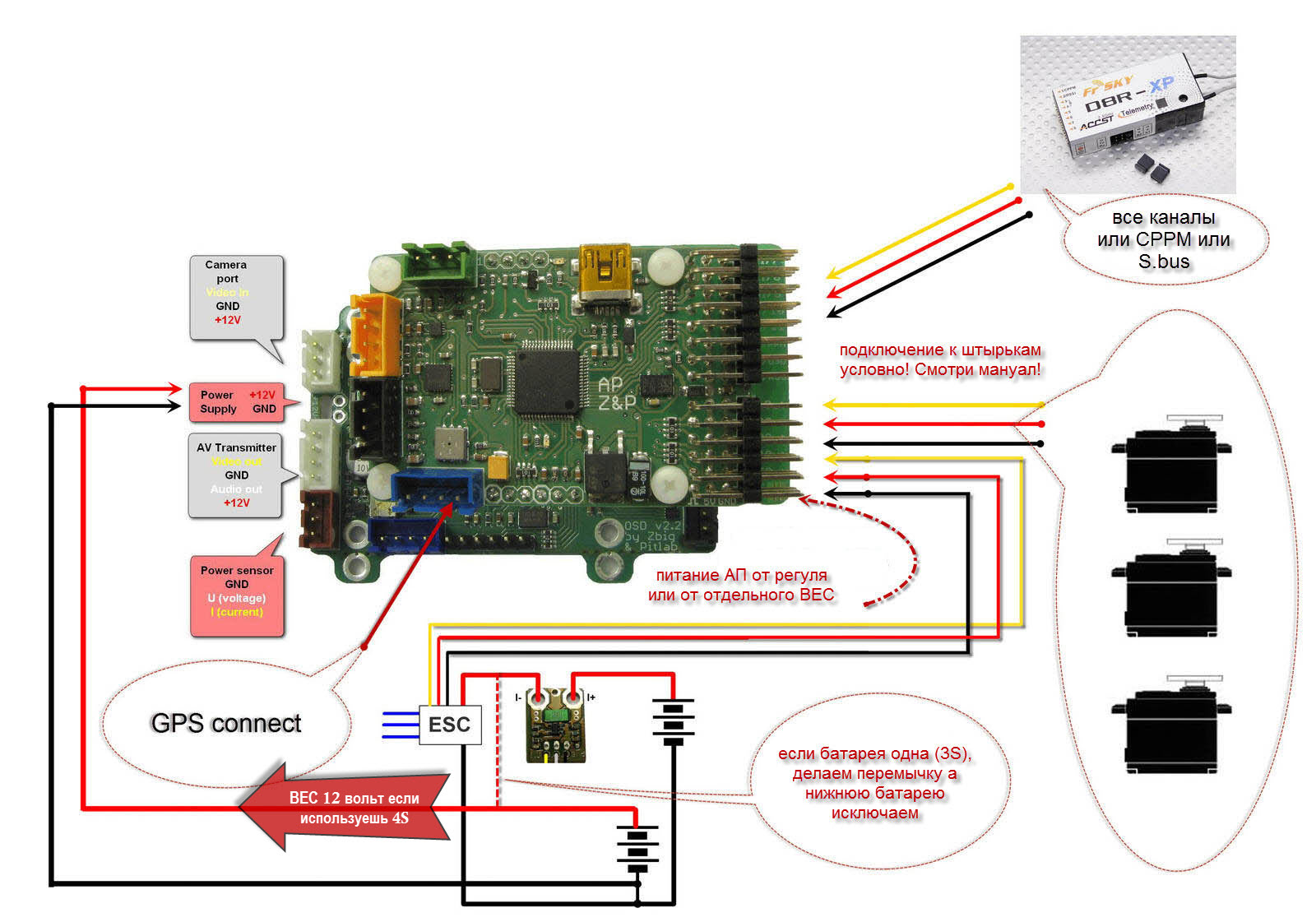
2. подключение всех соединений.
ВНИМАНИЕ! Все подключения ПРОВОДОВ к каналам должны производится строго в соответствии с инструкцией! Менять местами провода и делать не по инструкции запрещено!
Обратите внимание!!! Например ПРОВОД управления газом, это всегда ПИН №4 не смотря на настройки в аппе! Это же касается всех остальных каналов!
При использовании Parallel PPM в менеджере ничего менять не нужно, просто втыкайте провода строго в соответствии с инструкцией!
Если вы используете S.bus или CPPM, ВХОДНОЙ провод втыкается в ПИН №1, ВЫХОДНЫЕ строго в соответствии с инструкцией и далее в FPV_manager каналы
можно "переместить" в соответствии с тем как это настроено в аппе.
настройка и подключение V-tail можно посмотреть в "Частых вопросах"
Кликабельно
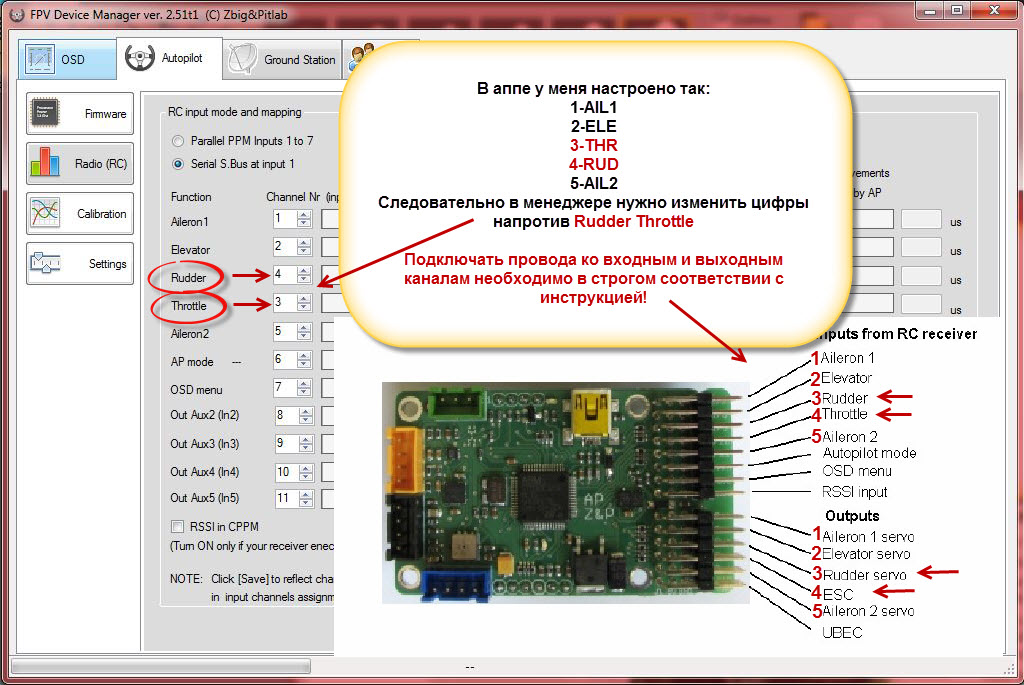
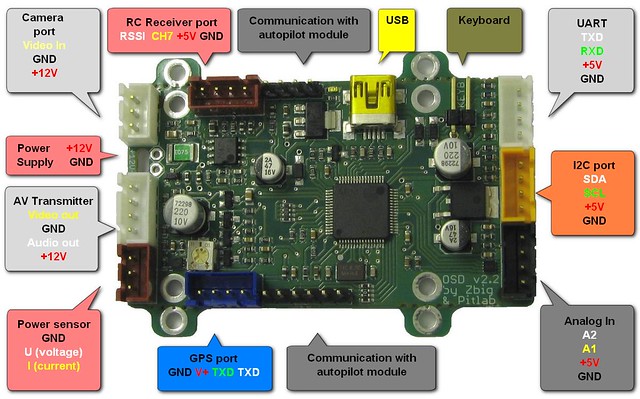
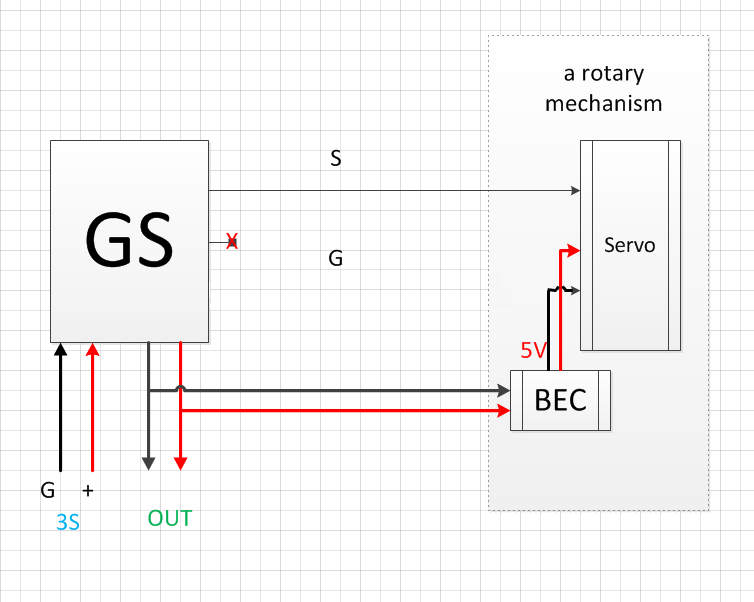
Схема основных соединений
Кликабельно
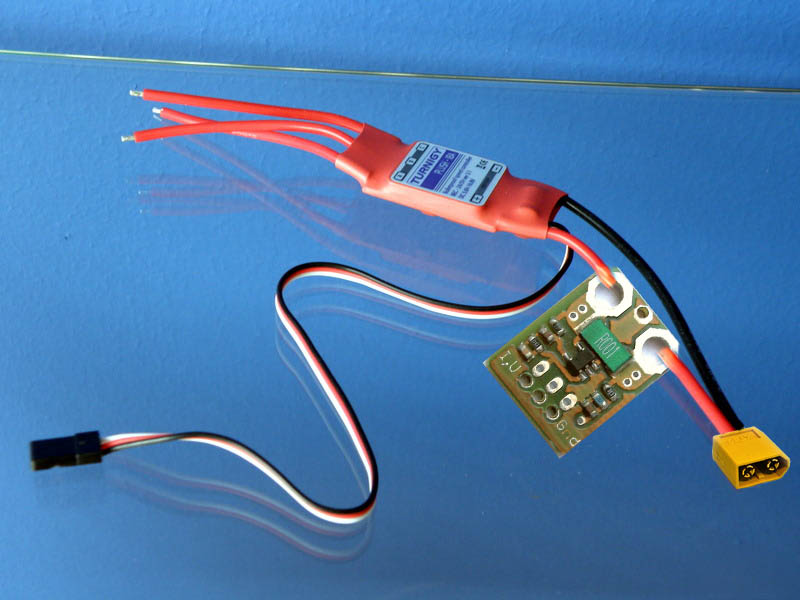
Датчик тока имеет полярность и подключается именно так как на рисунке.
Кликабельно
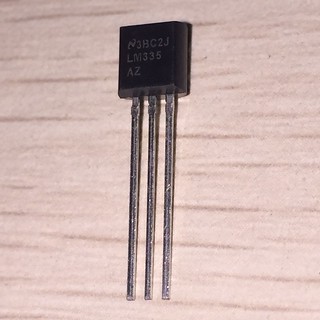
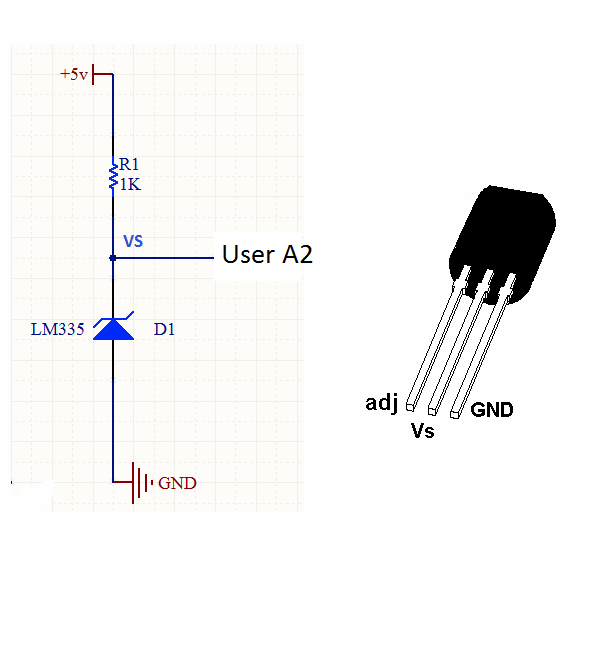
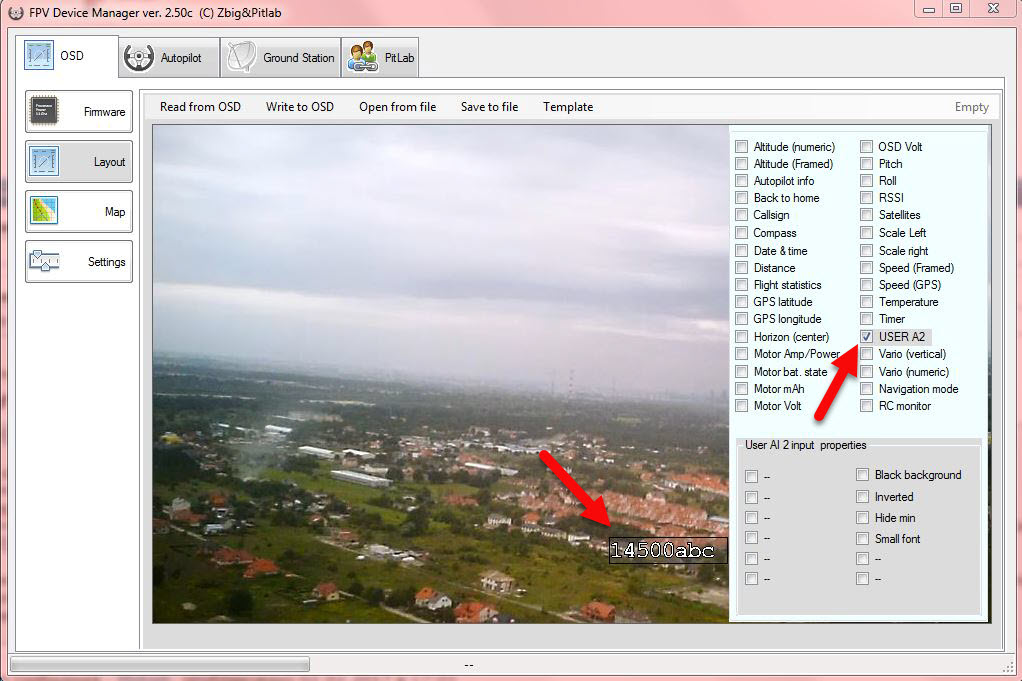
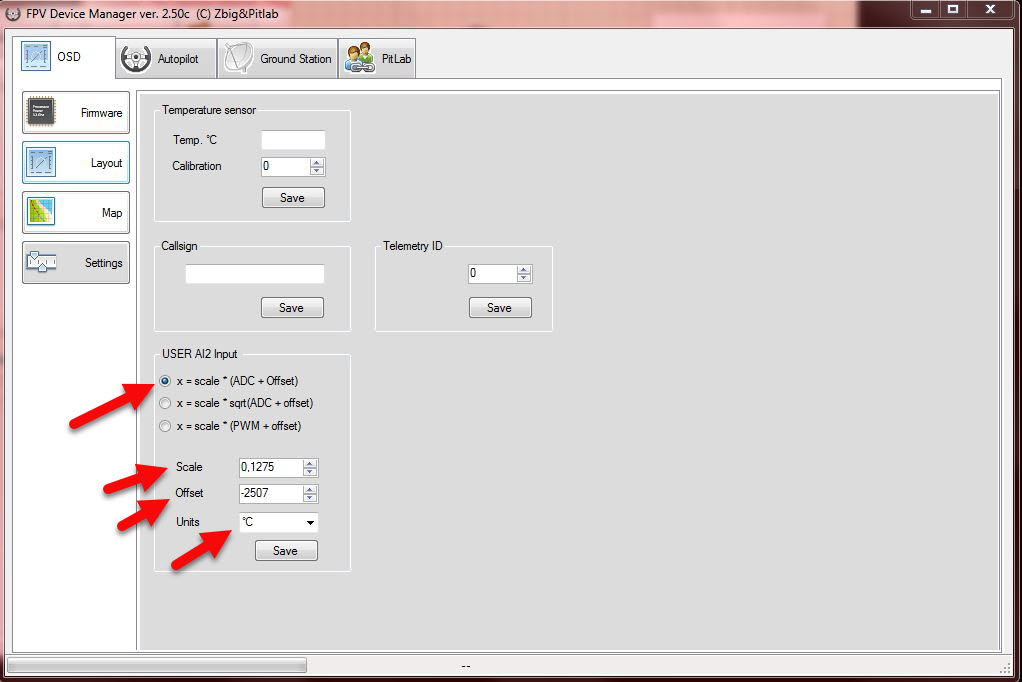
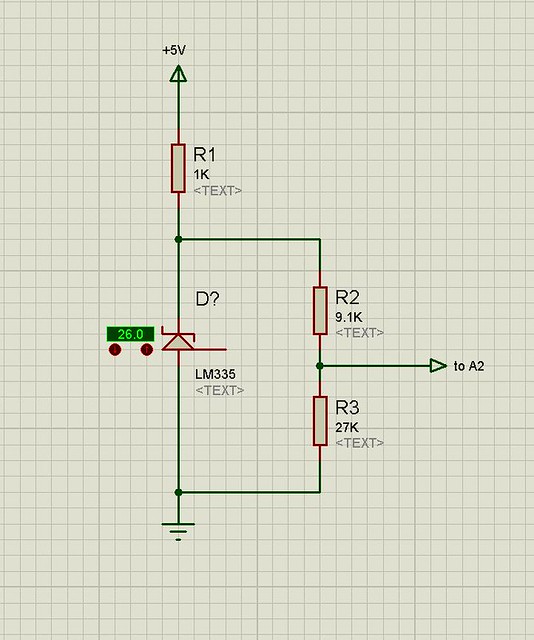
Датчик температуры и датчик воздушной скорости подключаются к плате OSD, для их подключения придётся разъединить платы, имейте это ввиду заранее.
Если используется датчик воздушной скорости, необходимо помнить:
распиновка датчика не стандартна! Необходима переделка. Датчик подключается только к плате OSD!
Кликабельно

камера и передатчик подключаются прямо к плате OSD (по умолчанию подразумевает питание камеры и передатчика от 12 вольт)
3. полная настройка модели в аппаратуре, этот шаг ОБЯЗАТЕЛЬНЫЙ и выполняется в вашей аппаратуре РУ, со всеми миксами и т.д.
Как это сделать? Читайте инструкцию к своей аппаратуре, это не имеет отношения к Питлабу...

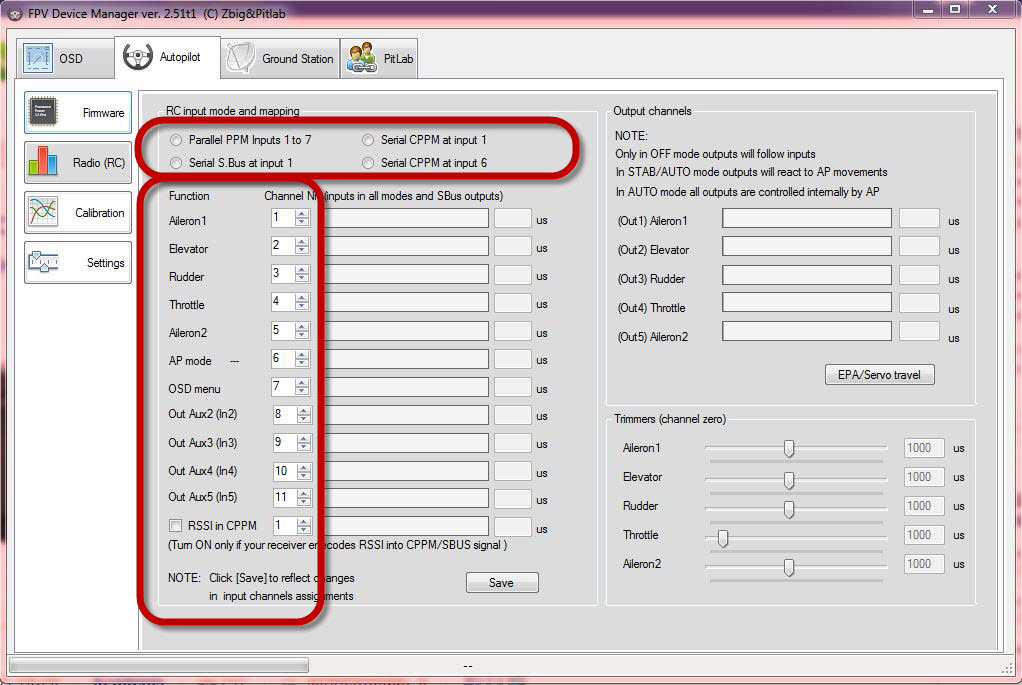
4. настройка типа подаваемого на АП сигнала с приемника(pwm, cppm, sbus) а так же соответствия управляемых каналов (при помощи FPV-manager)
Подключить АП к компу, выбрать нужный входной сигнал, напротив надписей органов управления поправить номера каналов. Нажать Save
Кликабельно
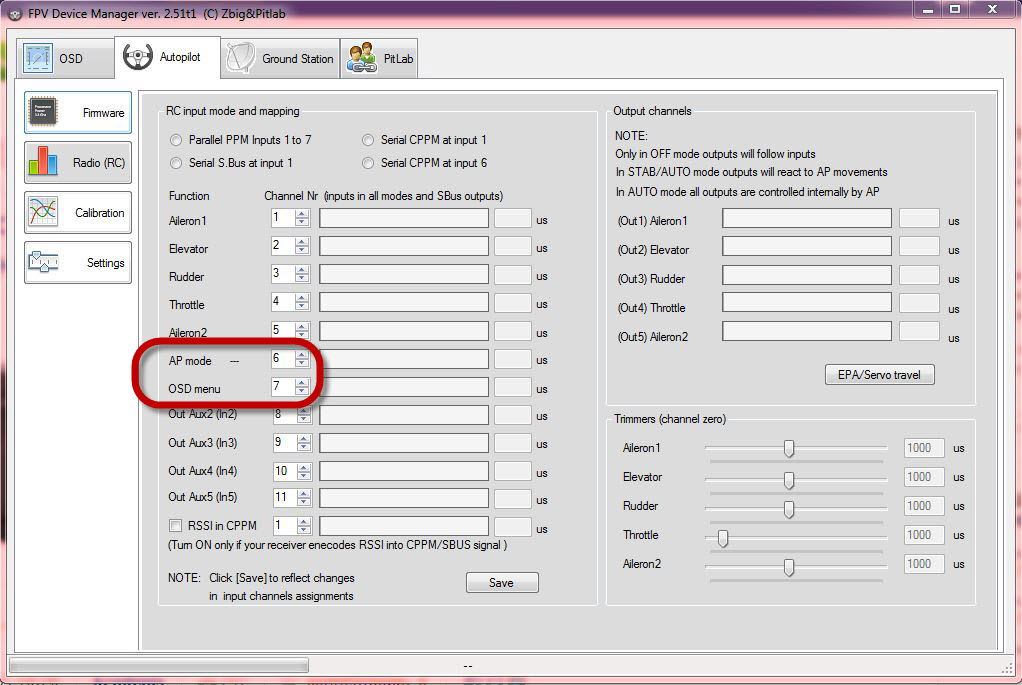
5. настройка каналов управления Автопилотом и ОСД на аппаратуре РУ, указание этих каналов в АП при помощи FPV-manager
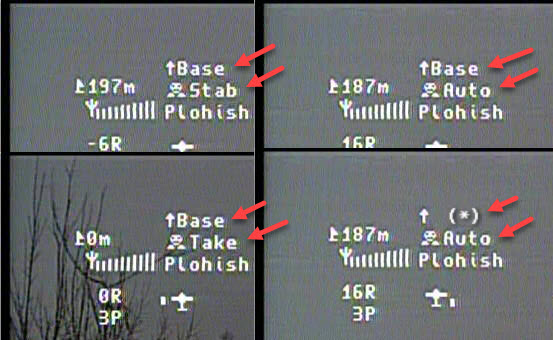
Режимы автопилота
Управление режимами автопилота осуществляется с помощью
трехпозиционного переключателя на канале, подключенном в
разъем MODE(или в составе всех каналов по CPPM, S.bus).
Режимы выбираются таким образом:
• Канал на минимуме: (длина импульса PPM меньше чем 1200 мкс): OFF – ручной режим.
• Канал в центральном значении (длина импульса PPM между 1300 и 1700 мкс): STAB – стабилизация.
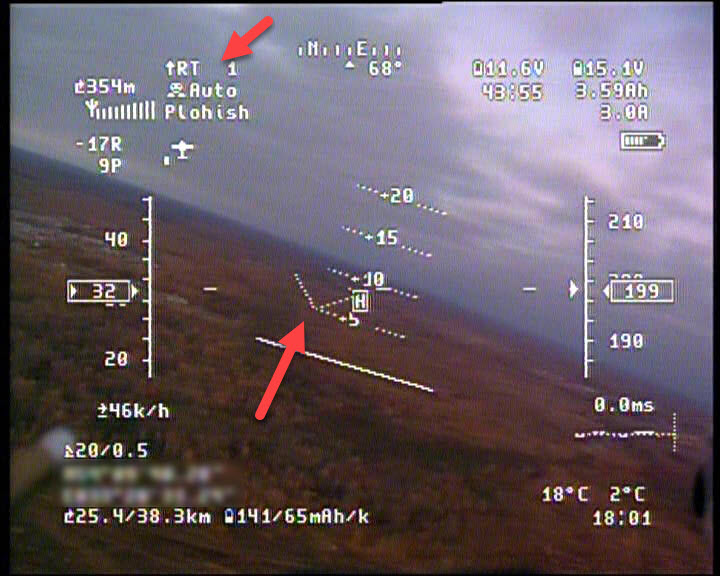
• Канал на максимуме (импульс длиннее чем 1800 мкс): AUTO – автовозврат в точку старта.
ИНФОРМАЦИЯ
Более того, в режиме автономного полета можно выбрать один из
трех вариантов поведения с помощью ручки газа.
• Газ на минимуме: AUTO – возврат в точку старта.
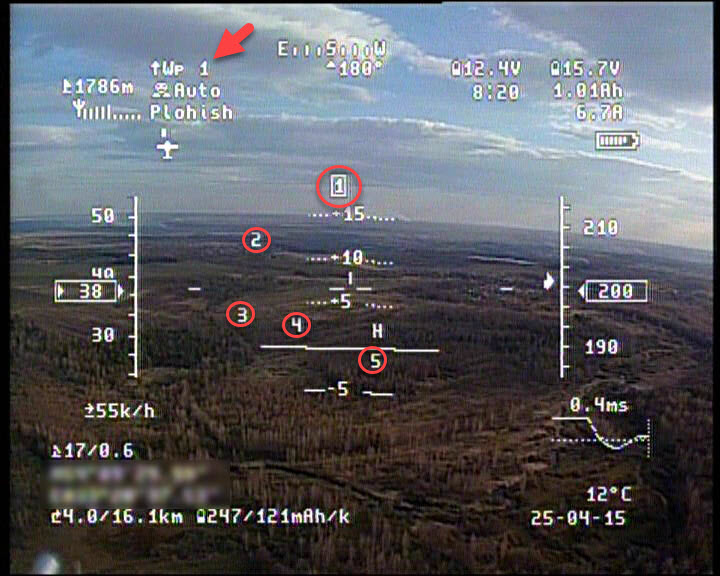
• Газ в центре: WP – полет по точкам вдоль маршрута.
• Газ на максимуме: (*) - кружение вокруг текущей точки,
используя GPS.
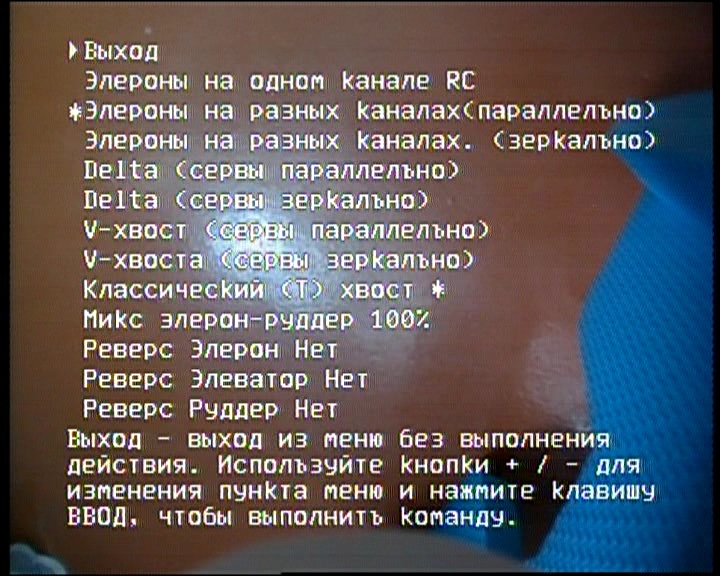
Навигация по меню OSD с радиопередатчика
Можно управлять меню, используя 3-позиционный переключатель на
передатчике РУ, подключенном в разъем OSD menu (или в составе всех каналов по CPPM, S.bus).:
• "Минимальное" значение – PPM импульс меньше чем 1250 мкс
• "Нейтральное" значение – PPM импульс между 1250-1750 мкс
• "Максимальное" значение – PPM импульс больше чем 1750 мкс
Вызов меню – переключатель на «минимальном» значении.
Выбор пункта меню – переход к следующему производится с
помощью перевода переключателя в «нейтральную» позицию и
возврата в «минимальное» значение.
Подтверждение пункта – Когда переключатель на «максимуме» либо
оставлен на «минимуме» на протяжении 5 секунд..
Выход из меню – соответствующим пунктом, либо если оставить
переключатель на «нейтрали» на протяжении 5 секунд, либо при
отсутствии действий на протяжении 5 секундах
Кликабельно
После настройки всех каналов управления можно дополнительно подать питание на АП и проверить все органы управления глядя на экран компьютера,
полоски напротив нужного используемого в данный момент органа управления должны двигаться...
6.Указание автопилоту типа летательного аппарата(классика, крыло, V-tail и т.д. ... ) через меню OSD
настраивается прохождением Autopilot->Mixers->Easy Setup(на указанном ниже скрине этот пункт отсутствует, картинка старая)
на каждом шаге нужно удерживать РУЛИ (не стики!) в положении указанном на экране и нажимать ENTER на мини клавиатуре
или настроить вручную указанием типа поверхностей и способа установки серв (закладка Autopilot->Mixers)
Кликабельно
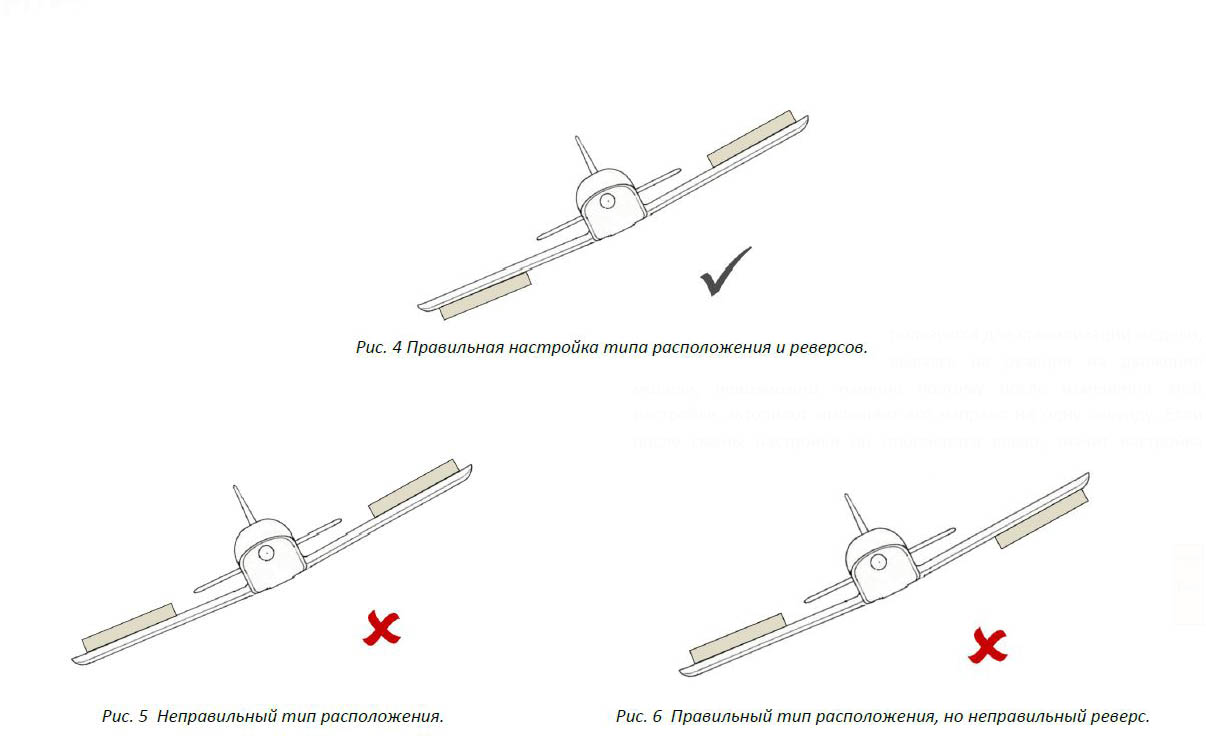
ВНИМАНИЕ! После прохождения EASY SETUP необходимо проверить корректность отклонения рулевых поверхностей в режиме STAB.
Всё поверхности должны корректно отрабатывать перемещение самолёта в пространстве!
Если нос самолёта имеет наклон вниз, руль высоты должен приподниматься, если нос самолёта отклонён вверх, руль наоборот должен отклоняться вниз.
Если правое крыло ниже, элерон на правом крыле отклоняется вниз, на левом вверх... ну и естественно если левое крыло ниже то наоборот...
Проверка рудера при включении питания АП, рудер на секунду отклоняется вправо.
Кликабельно
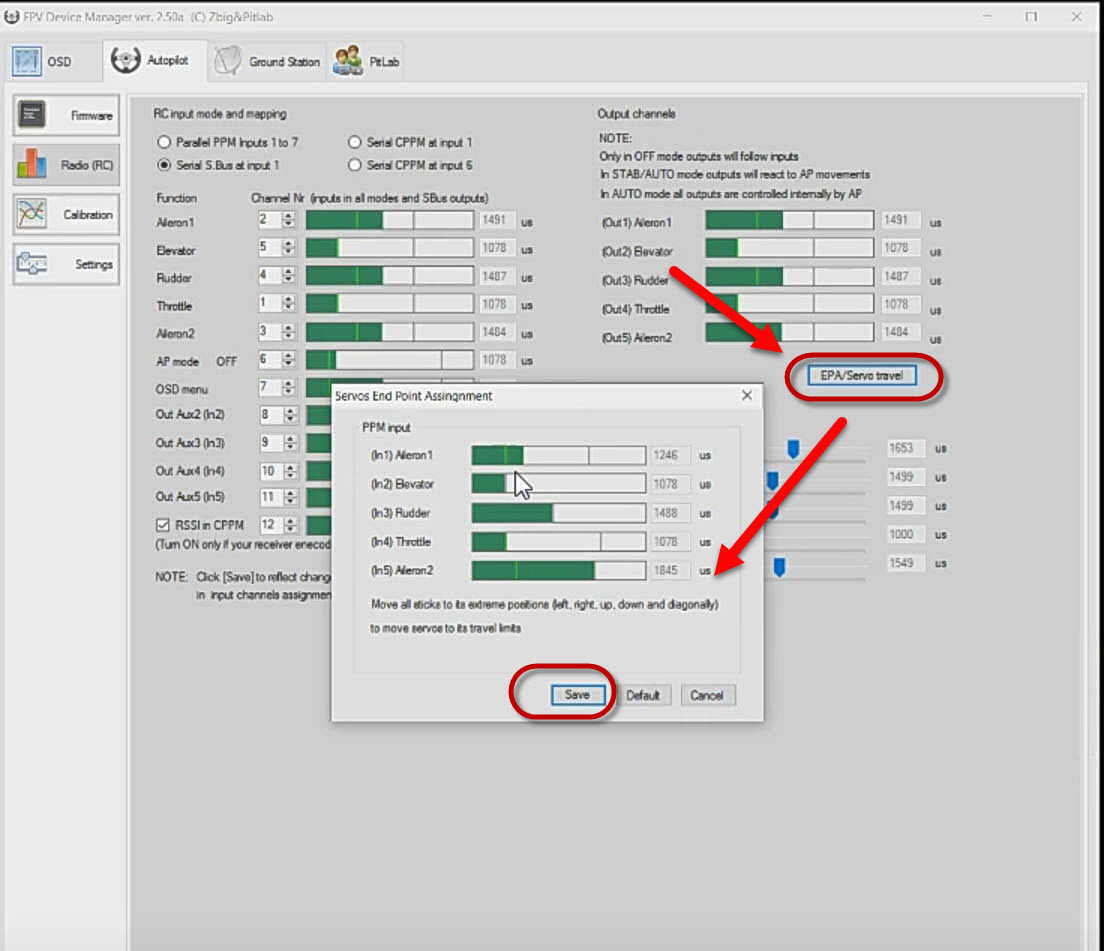
7.установка конечных точек работы сервомеханизмов для АП (при помощи FPV-manager)
Подключить АП к компьютеру, включить РУ, подключить питание автопилота.
Выставить 100% расходы на аппаратуре!!! Это важно!
В режиме "OFF" войти в меню EPA, подёргать стиками во всех направлениях, в том числе и по диагоналям,
АП запомнит конечные точки для работы в режиме AUTO, нажать Save
Кликабельно
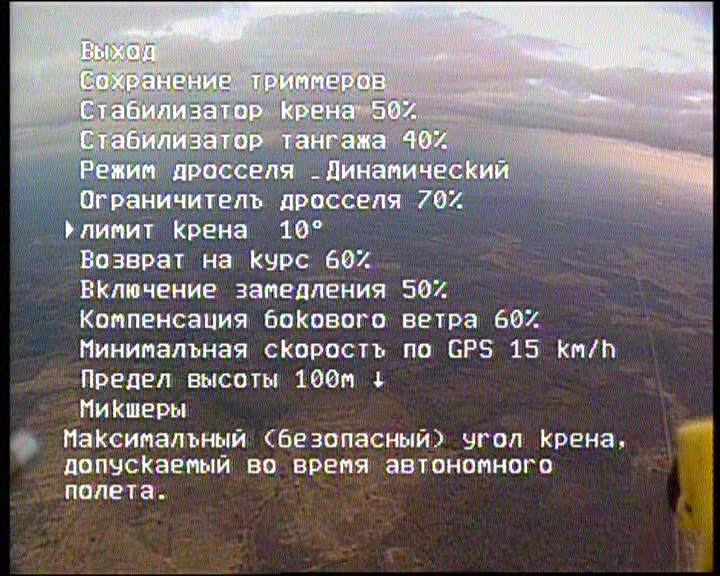
8.настройка основных параметров полёта через меню ОСД (углы кренов, тип управления газом и т.д. ...)
для начала эти параметры как правило остаются по умолчанию и уже позже после тестовых полётов редактируются под ваши нужды...
Кликабельно
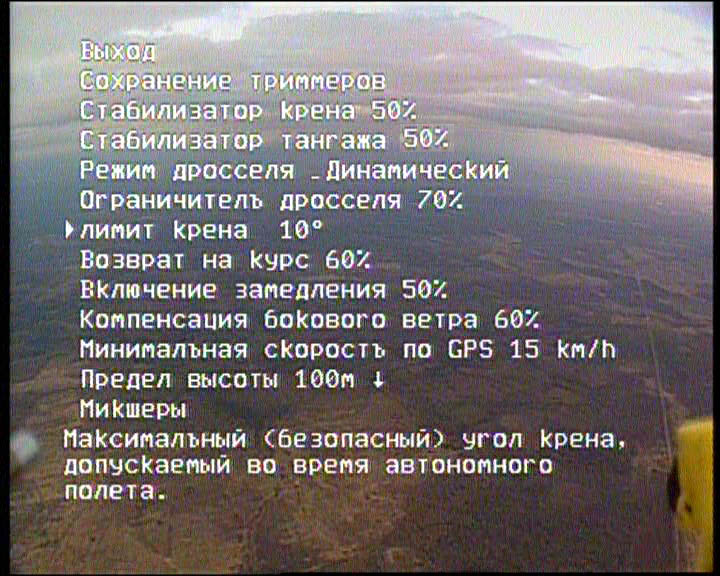
настройки на скрине показаны для примера и не являются обязательными!
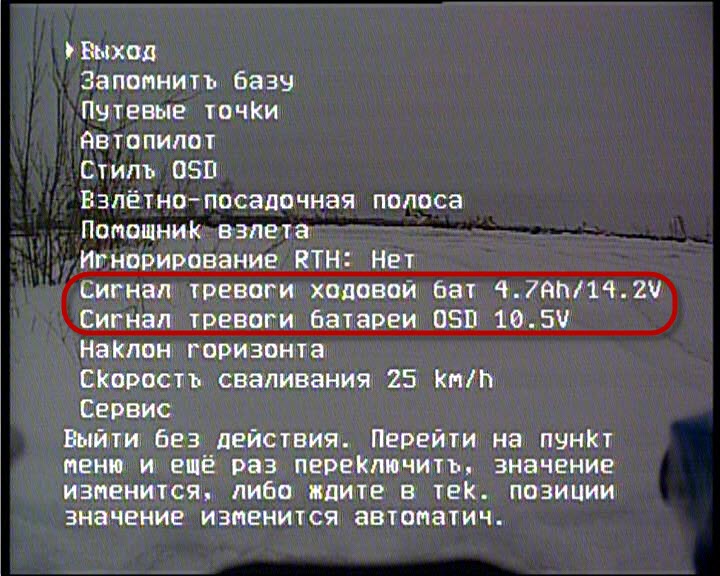
9.настройка основных параметров ОСД, таких как количество банок батареи, калибровка напряжений ходовой и видео батареи,
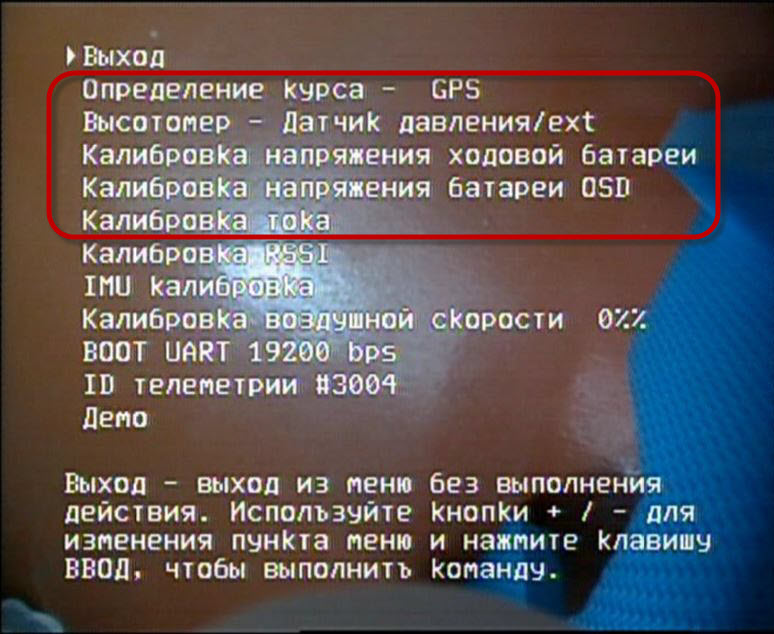
калибровка тока ходовой батареи, сигналы тревоги ходовой и видео батареи, определение курса и высоты...
Выполняется через меню основное меню OSD, а так же закладка - Сервис
Определение курса - ОБЯЗАТЕЛЬНО установите "по GPS", высотомер рекомендую установить по датчику давления.
Кликабельно
Кликабельно
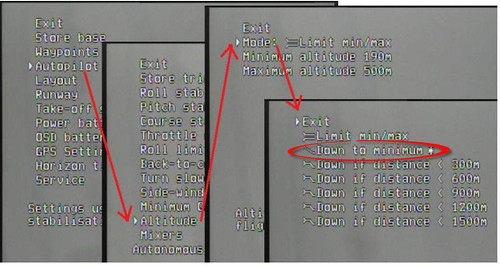
10. настройка типа АВТОВОЗВРАТА и режимов управления газом
Производится через меню OSD
Для начала я рекомендую установить режим дросселя - "Динамический" 80% (самый экономичный) и тип возврата Down to minimum
Автопилот Питлаб не имеет параметра настройки скорости возврата, скорость зависит от режима управления газом
и выбранного режима(типа) возврата.
"Режимы управления газом"
Автопилот имеет три режима управления газом, позволяющих
подогнать его поведение под конкретные нужды.
Динамический режим
рекомендуется для большинства моделей.
В этом режиме газ удерживается на том уровне, на котором
модель летит на постоянной высоте, в пределах лимита газа.
Это позволяет выполнять экономичный полет.
Режим постоянного газа
В этом режиме газ удерживается на уровне,
заданном лимитом газа. Этот режим применяется для скоростных моделей
с тенденцией к сваливанию, в сильный ветер, а так же в том случае,
когда необходим быстрый полет.
Режим вкл-выкл
Этот режим создан для моделей планеров. В данном режиме
мотор включается на уровень, заданный лимитом газа,
и выключается по увеличению высоты на 50-70 метров, после чего
модель планирует. По потере такого же количества высоты процесс повторяется.
"Режимы работы (типы) автовозврата"
Режим Down if distance less than…
В этом режиме, независимо от текущей высоты, автопилот изменит высоту, чтобы достичь заданной максимальной высоты, а затем будет лететь по направлению к базе на этой высоте над уровнем моря.
Когда расстояние до базы станет меньше, чем заданное а настройках, автопилот будет лететь вниз к выбранной минимальной высоте и далее по прямой линии до базы.
Это позволяет избежать очень высоких препятствий, таких как линии электропередач, заводских труб и холмов при полете обратно домой.
Режим Down to minimum:
В этом режиме автопилот летит домой контролируя высоту таким образом, чтобы достичь минимальной высоты в точке базы. С точки зрения потребления батареи, это, вероятно, самый экономичный способ полета обратно домой.
Когда выбрана эта опция, если самолет находится ниже установленной минимальной высоты, автопилот будет немедленно увеличить высоту самолета до минимума, а затем сохранит эту высоту во время полета в направлении базы.
Если самолет находится выше заданной минимальной высоты, автопилот будет уменьшать высоту пропорционально расстоянию до базы, чтобы достичь минимальной высоты по прибытию на базу.
Автопилот фактически летит по наклонной прямой от текущей высоты до точки "минимальная высота" над базой. Это может происходить с выключенным двигателем если самолёт хорошо планирует...
Режим Limit min/max:
В этом режиме автопилот держит самолет в заданных пределах высоты минимальная и максимальная.
Если самолет находится ниже минимальной высоты при RTH автопилот увеличит высоту самолета, пока самолет не достигнет указанного минимума, а затем сохранит эту высоту во время полета в направлении базы.
Такое поведение используется, чтобы избежать препятствий, таких как деревья или здания на пути домой.
Если самолет находится выше указанной максимальной высоты, автопилот будет немедленно уменьшать высоту, пока самолет не достигнет максимальной высоты, а затем продолжит полет к базе на этой высоте.
Если самолет находится между минимальной и максимальной высотой, при включении RTH автопилот будет держать самолет на текущей высоте.
Кликабельно, режим дросселя
Кликабельно, тип возврата
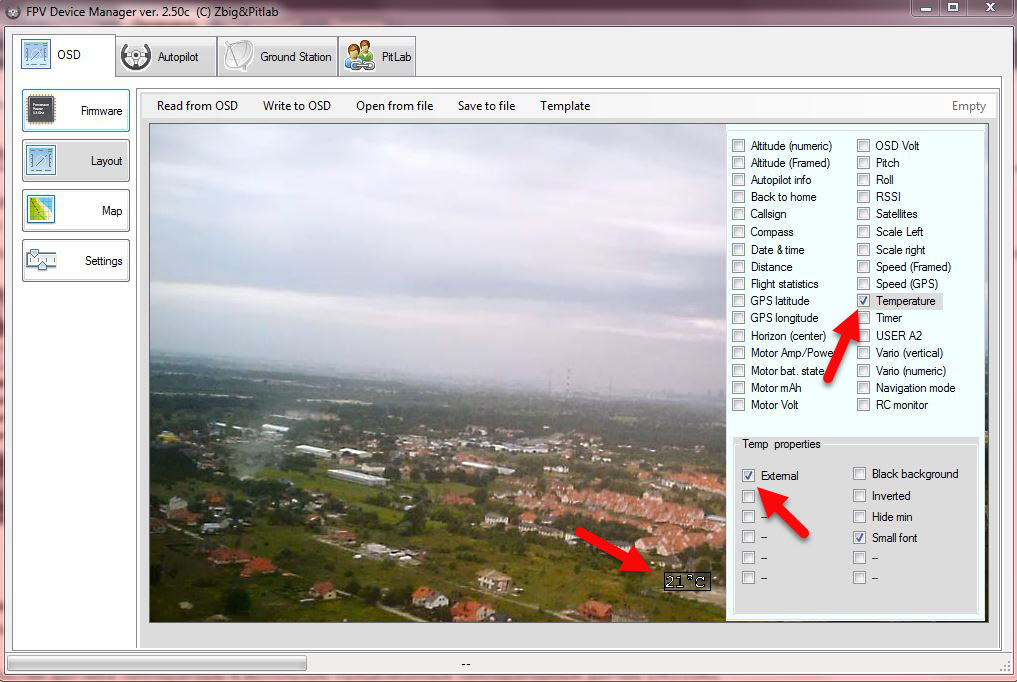
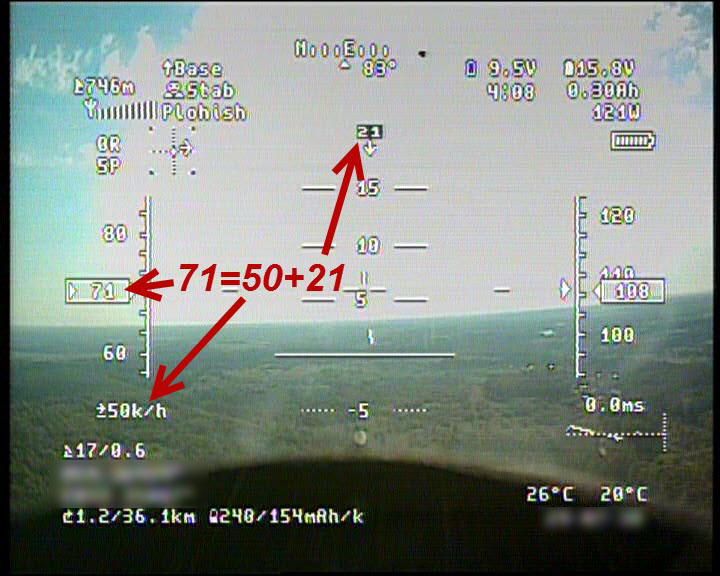
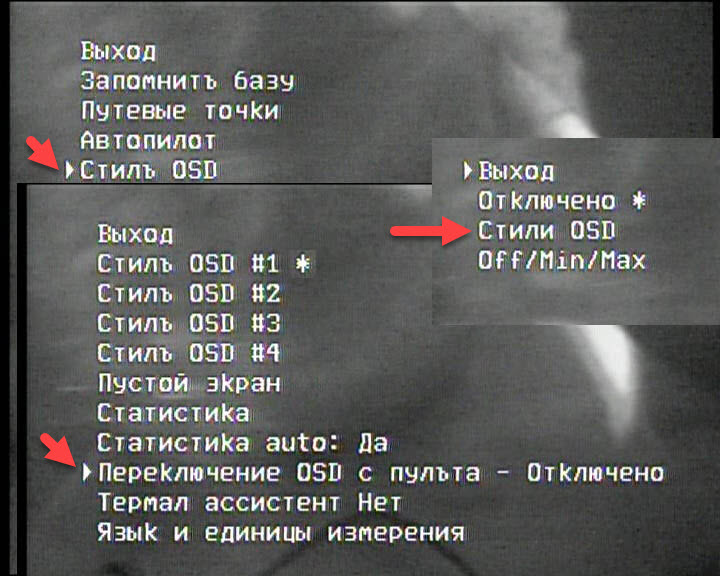
Внимание! Настоятельно рекомендую вывести на экран ОБЕ СТРОКИ отображения режимов автопилота! Смотри картинку ниже.
Эта опция позволит более правильно понимать, что делает АП в тот или иной момент времени.
Для начала можно использовать для экрана OSD темплейт "F16" или "F16 small font" (смотри в программе FPV_manager)
Запуск
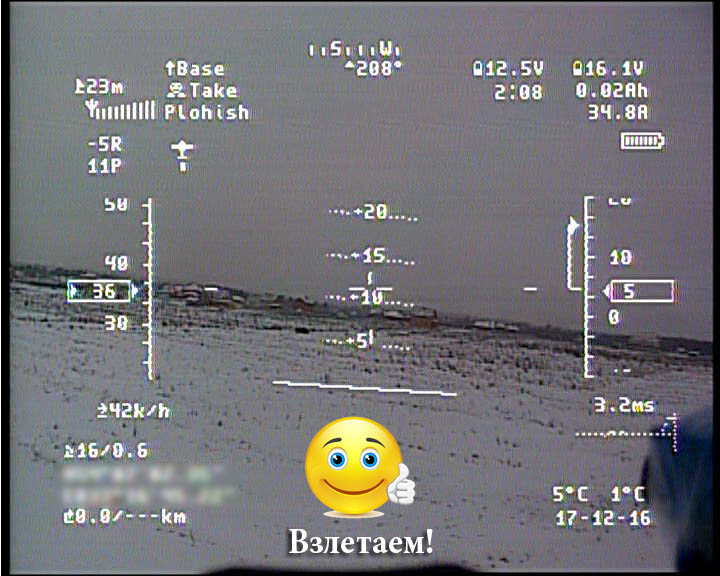
После включения питания дождаться наличия спутников, смотри OSD. Обычно этот процесс занимает не более 20-30 секунд, обычно это 10-13 спутников.
после этого обратить внимание на удаление от базы. Как правило система достаточно быстро и точно определяет ваше положение, с погрешностью 2-3 метра,
Кликабельно

но я взял для себя за правило, после включения питания и нахождения спутников провести процедуру запоминания базы. (операция не обязательная)
Кликабельно
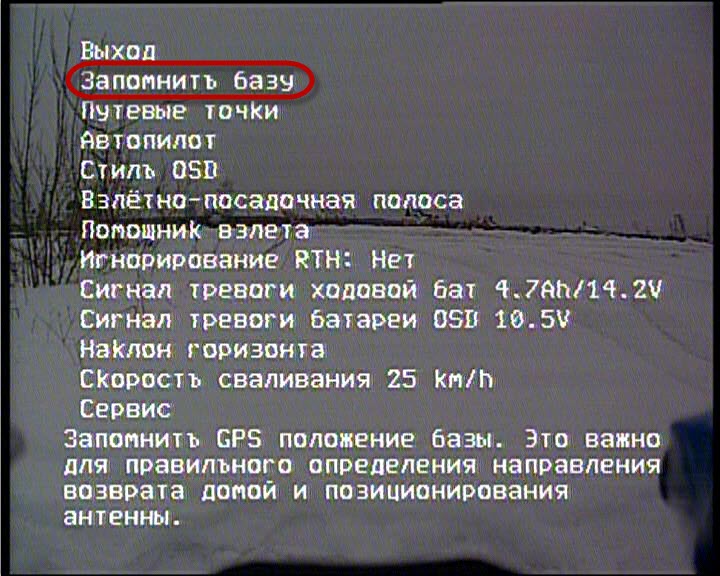
после этого расстояние до базы должно стать "ноль", проверяем напряжение ходовой и видео (скрин выше), если всё в норме, запускаем!
Обязательные условия первого запуска:
ВНИМАНИЕ! это очень важно, на этом основан принцип работы системы Питлаб.
Запустить модель в РУЧНОМ режиме, оттримировать на ровный устойчивый полёт,
а так же уверенный набор высоты полёта при уровне газа процентов от 70-80 и выше...
Это КЛЮЧЕВОЙ момент для нормальной работы АП
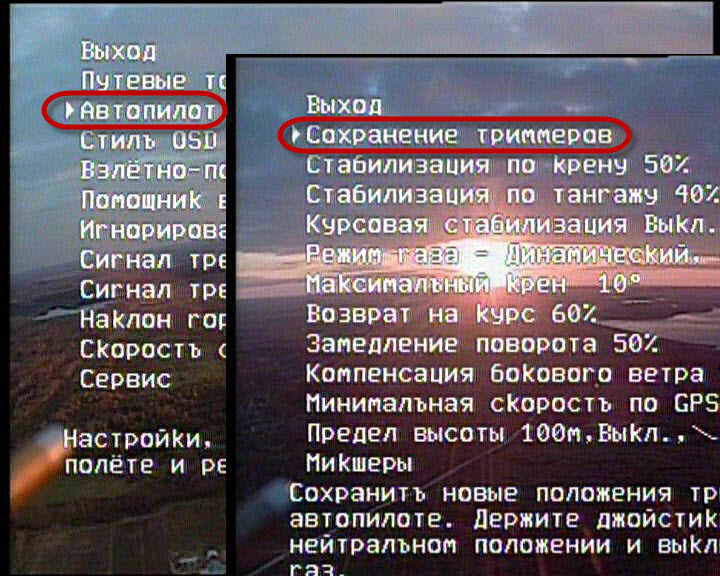
Далее необходимо установить минимальный уровень газа при котором модель летит ровно в горизонте не теряя высоты
и не изменяет направления (самый экономичный режим полёта в горизонте),
зайти в меню OSD и выполнить операцию сохранения тримеров.
Кликабельно
После этого можно включить режим "Stab", направление полёта и высота не должны измениться... По управлению модель станет мягкой, вялой... При отпускании стиков должна возвращаться в ровный полёт (не забываем про газ)
После этого можно слегка удалив модель от базы и набрав немного высоты попробовать режим "AUTO", будьте готовы всегда перехватить модель снова в режим "Stab", так как на дефолтных настройках модель может вести себя плохо...
Далее следует тюнинг основных полётных настроек через меню OSD (углы наклона, параметры стабилизации и т.д.)
Вот как то так... Подробнее все эти шаги можно найти в инструкциях, что непонятно спрашиваете, всегда помогу.
Уважаемые господа, попрошу в комментах только техническую информацию,
я не хочу чтобы и тут было полно трёпа как в теме о Питлаб...
Не обижайтесь если кого отмодерю...