
PitLab FAQ, Часто задаваемые вопросы, ЧАВО Питлаб (часть 1)

В этой статье я постараюсь дать ответы на вопросы, с которыми начинающие пользователи Питлаб сталкиваются при освоении системы.

Начнём с подключения дополнительного датчика температуры к аналоговому порту USER A2
Указанный порт позволяет принимать аналоговый сигнал от любого датчика с напряжением до 3,3 вольт.
В качестве датчика температуры я использую прецизионный температурный датчик LM335AZ
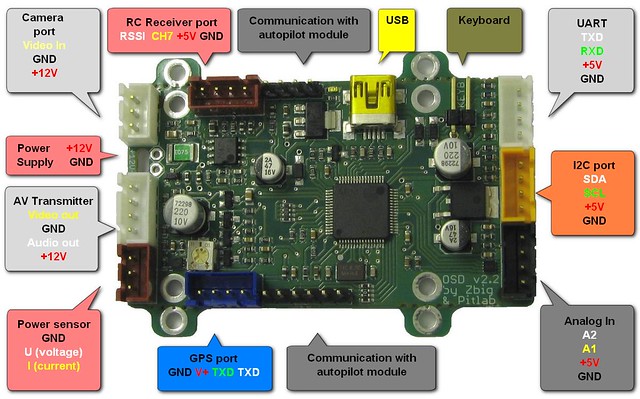
Порты A1 и A2 находятся на плате OSD - Analog IN (для подключения потребуется разъединить OSD и АП).
В порт А1 или А2 можно подключить внешний датчик температуры купленный вместе с системой(в принципе можно и самому сделать).
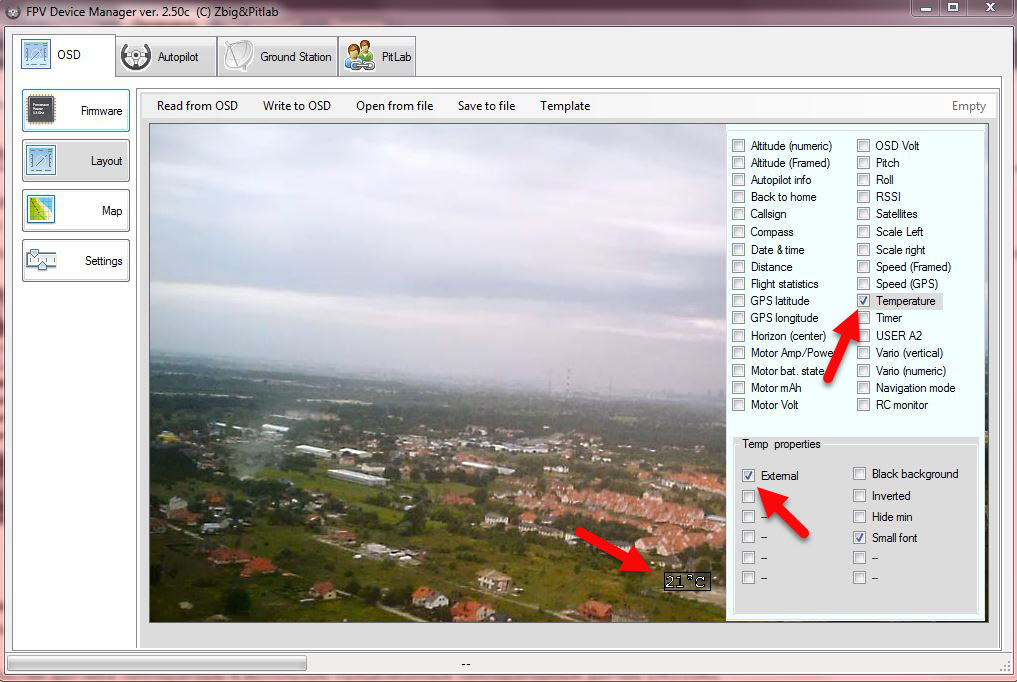
Включаем через FPV_manager иконку отображения температуры, ставим галочку "External"
Сделать датчик самому не так сложно.
Схема подключения:
Кликабельно
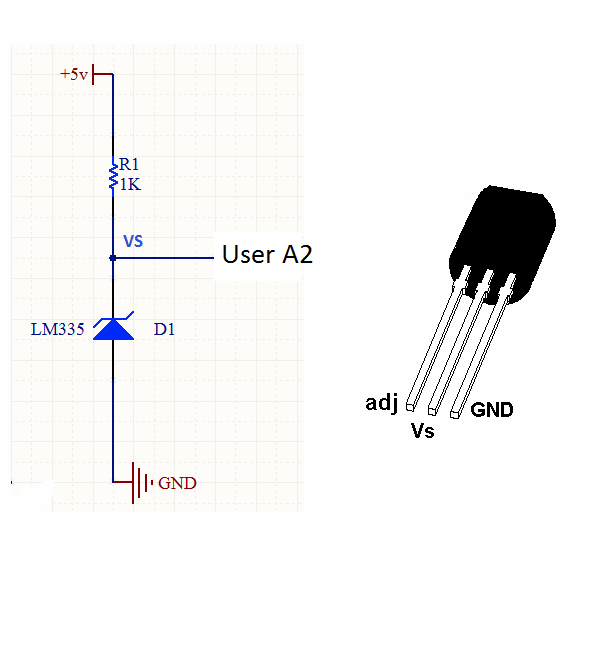
резистор желательно установить возле самого датчика
(ВНИМАНИЕ! датчик продаваемый на сайте Питлаб, уже содержит дополнительный резистор в цепи питания датчика.)
я делал небольшой кусочек текстолита, припаивал к нему датчик, резистор и к плате уже "гнал" три провода: плюс, мину, и собственно A2
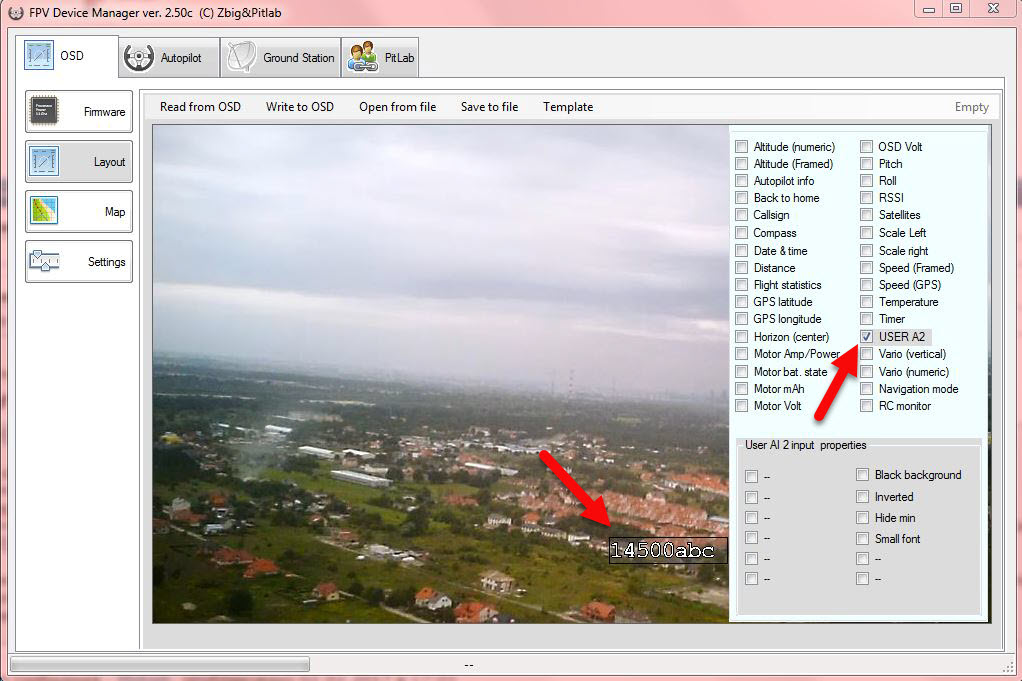
Далее необходимо активировать иконку USER A2 при помощи FPV_manager
теперь нужно сделать некоторые расчёты и внести данные в АП при помощи FPV_manager
Формула расчёта:
(*) x = scale * (ADC + offset)
где:
x – показания на OSD
scale – коэффициент масштабирования напряжения
offset – компенсация смещения нулевой точки
ADC- значение измеренное на входе А2
все значения используются целыми, без дробной части.
Для расчёта потребуется:
1. подключить датчик к плате OSD
2. подключить OSD к порту USB
3. Запустить FPV_manager
4. открыть закладку OSD->Layout
5. считать текущий экран OSD
6. включить опцию USER A2 (картинка выше)
7. записать ваши настройки обратно в OSD
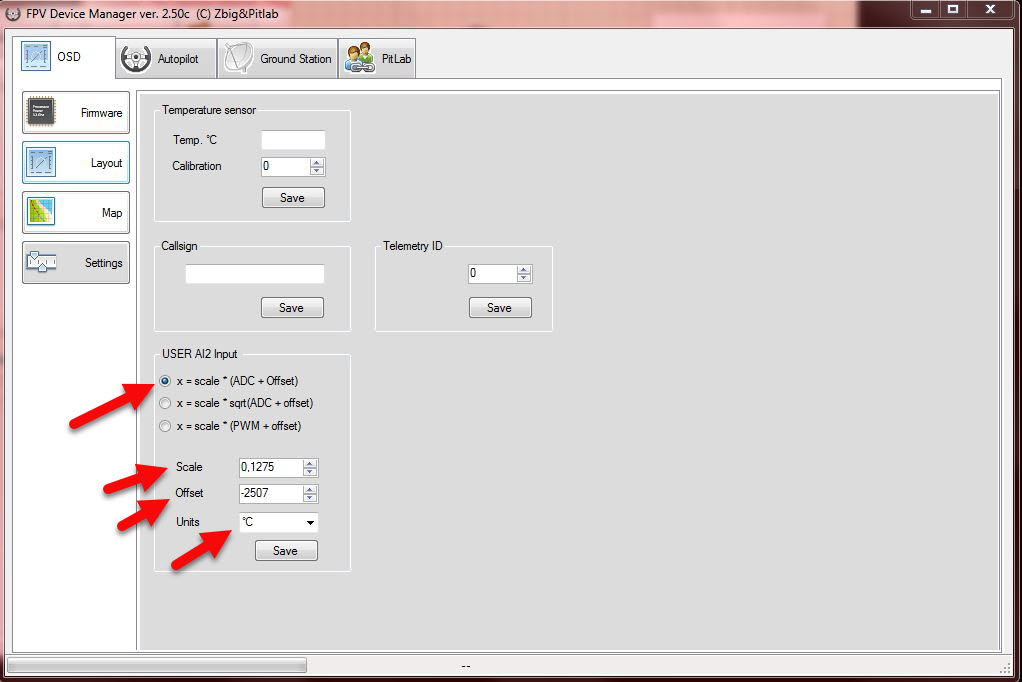
8. открыть страницу OSD->settings
9. установить режим - (*) x = scale * (ADC + offset)
10. в поле USER A2 ввести scale = 1 и offset = 0 после этого нажать кнопку [save]
11. охладите датчик замеряя температуру термометром, запишите показания термометра, это будет – Low_in,
и запишите показания на экране OSD, это будет - Low_osd (показания смотреть не в программе а на мониторе!)
12. нагрейте датчик замеряя температуру термометром, запишите показания термометра, это будет – Hi_in,
и запишите показания на экране OSD, это будет - Hi_osd (показания смотреть не в программе а на мониторе!)
Рассчитайте по формуле:
scale = (Hi_in – Lo-in) / (Hi_osd – Lo_osd)
offset = (Lo_in / scale) – Lo_osd
Введите scale и offset в указанные поля, укажите в поле units-"С" (градусы) и нажмите кнопку [save].
(на картинке указаны произвольные цифры для примера)
Настройка датчика окончена. (мне пришлось немного "подкрутить" offset на глазок, контролируя показания на OSD,
для получения реальных показаний)
Теперь небольшой лайфхак, датчик температуры LM335AZ имеет точку калибровки 25 градусов Цельсия (298.15 Kelvin)
выходное напряжение при этом 2,9815V (0.010 вольт на градус)
таким образом максимальная температура с напряжением 3,3 вольт = около 57 градусов...
Меня это не устроило, я хотел измерять перегрев регуля, а он греется сильнее...
Чтобы решить эту проблему, я поставил дополнительный делитель на резисторах, таким образом сдвинув диапазон датчика за сотню градусов...
Возможно чуть пострадала точность, но мне пофиг...
Схема стала выглядеть так:
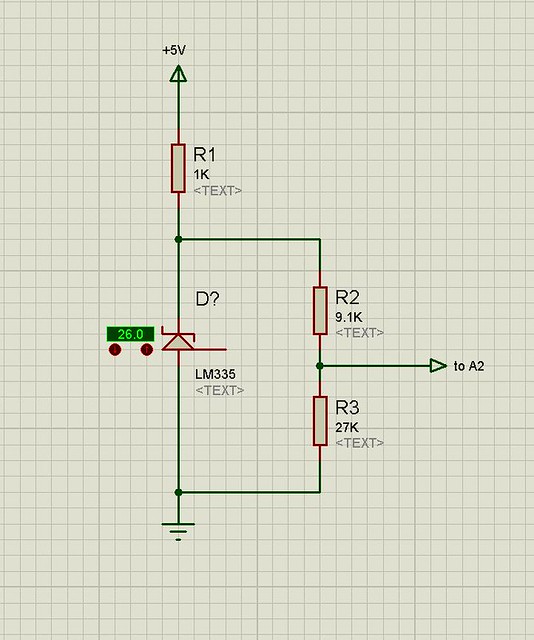
В остальном всё то же самое...
==================================================================================================================
V-tail настройка и подключение.
По сути всё просто, на двух любых каналах вашей аппаратуры делается по два микса: Елеватор и Рудддер с определённым весом и направлением + и -
В моём случае это каналы 2 и 4, вес 50%
Направление в вашем случае может быть другим, если сервы вклеены по другому.
Картинка настройки для mini Talon

==================================================================================================================
Настройка датчика воздушной скорости
Я обычно поступаю так:
1. Естественно при включении питания или при запоминании базы на трубке одет чехол, красного цвета, чтобы не забыть...
хотя было, забывал :)

2. Поправку в настройках устанавливаю на "ноль"
3. в полёте делаю круг, в ручном или в "стаб"... при этом нельзя изменять положение стика газа и пользоваться рулями высоты и направления...
не нужно стараться выдерживать круг по траектории...
просто положил аккуратненько на крыло, не слишком круто, плавно развернулся на 360 градусов...
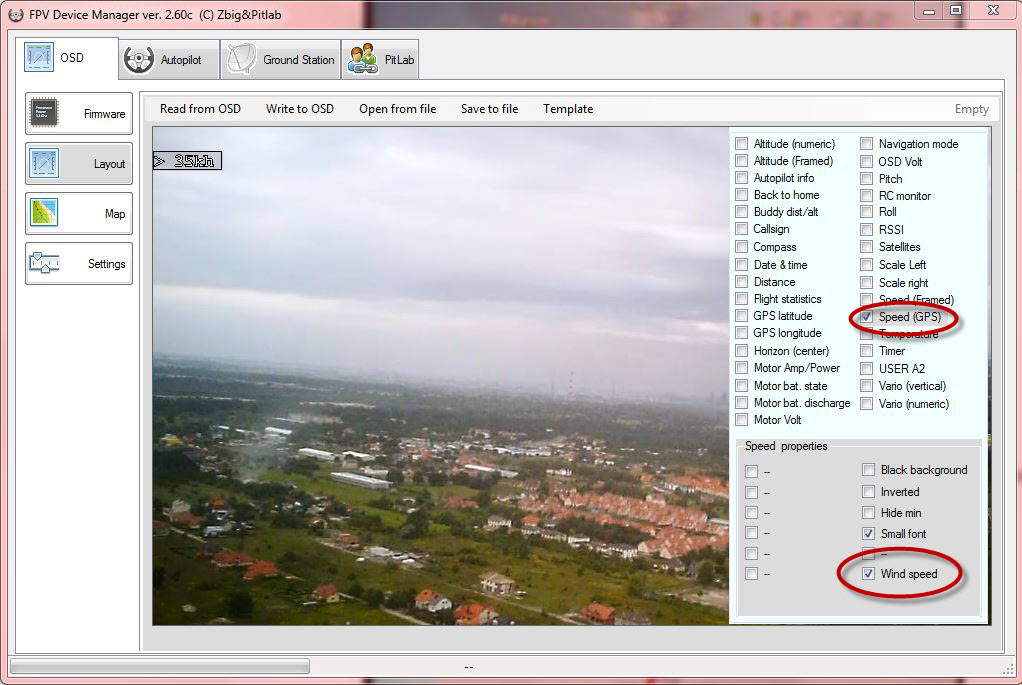
на OSD должен появиться знак со скоростью и направлением ветра, АП достаточно чётко определяет направление и скорость ветра по GPS сносу
(для того, чтобы увидеть это на OSD, нужно включить через FPV_manager в пункте SpeedGPS галочку Wind speed)

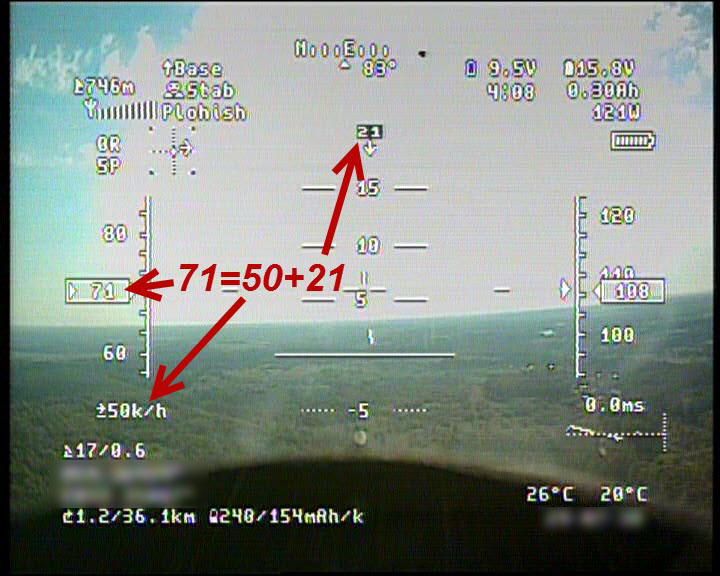
4. встаю курсом на ветер, и после этого уже устанавливаю поправку датчику, чтобы ВОЗДУШНАЯ скорость была ровна скорости по GPS плюс СКОРОСТЬ ВЕТРА.
(надо понимать, что прям в ноль соответствия возможно и не будет, но как правило очень близко.)
Всё, на этом настройка закончена и никогда к ней не возвращаюсь! НЕ смотря на то, что например при взлёте или после посадки датчик показывает фигню...

Разработчик говорит: "Датчик вещь очень чувствительная, и при отсуттсвии движения самолёта, показывает флуктуации - всё что угодно...
Однако после набора буквально 5-10 километров в час, флуктуации датчика становятся несоизмеримо меньше полезного сигнала и он выходит на нормальные показания..."
=======================================================================================================================
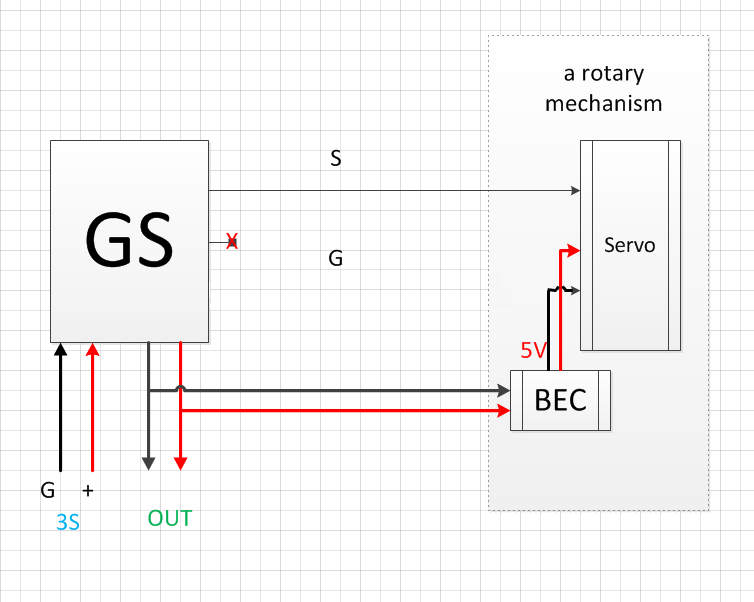
Подключение серво механизмов на поворотном устройстве
Очень рекомендую подключить питание серв по такой схеме
=============================================================================================================
Вот есть вопрос. Стоит датчик воздушной скорости. В левой шкале отображается имено воздушная, с датчика.
А где скорость по GPS? По идее, должно быть видно две...
Может в менеджере чего пропустил? Просветите. Я не один, страждущий.
Вы уверены что на шкале слева именно воздушная скорость?
Есть признак, по которому можно это утверждать, справа от цифры скорости, должен быть знак ">", например 47>
в этом случае мы можем говорить что это "воздушка", если знака нет - это GPS
Как правильно включить обе скорости:
в FPV_manager в настройках экрана пункт Speed (Framed) - он отвечает за левую шкалу OSD, ставим галку (включилась GPS скорость) и оставаясь в этом же пункте, справа внизу(подпункты) поставить галку AirSpeed
мы включили воздушку вместо GPS на левую шкалу
теперь отдельная скорость по GPS, пункт Speed (GPS) - на экране появляется значок со скоростью GPS, перемещаем его в нужное место, сохраняем настройки.
===================================================================================================
Кстати, что за значение "STALL" слева у шкалы? Пробовал в менюшке OSD изменять значение - замысловатое что-то кажет...
STALL это всего лишь индикатор, что твоя воздушная скорость снизилась ниже порога установленного в настройках OSD.
Этот параметр ничем не управляет, просто индикатор чтобы ты видел, скорость приближается к сваливанию...
если её установить на грани сваливания, её практически никогда не видно, но как индикация будет полезна, если вдруг "задумался"
====================================================================================================
Нужно ли помечать в менеджере, на вкладке каналов, внизу слева в квадратике "RSSI in SPPM" ?
Многие современные приёмники, могут "паковать" сигнал RSSI в CPPM или в S.bus в виде длины импульса на определённом канале.
В этом случае сигнал с приёмника в АП передаётся по одному проводу, он передаёт информацию о состоянии по всем каналам, плюс RSSI зашифрованный в одном из каналов.
Именно в этом случае ставится галочка "RSSI in SPPM" и указывается нужный канал
=====================================================================================================
Пока не ясно как вызывать ОСД меню на экран с помощью радиопередатчика.
Для управления отображением меню OSD через переключатель в передатчике, требуется ТРЁХ-позиционный переключатель.
как настроить, смотри в инструкции.
Канал на котором настроен этот переключатель указывается в FPV_manager в закладке "каналы" как управляющий OSD
Как управлять?
переключатель изначально должен находится в "центральном" положении.
Отклоняем переключатель в сторону "уменьшения длины импульса" и сразу возвращаем обратно в центральное - вы должны увидеть меню OSD
снова отклоняем переключатель в сторону "уменьшения длины импульса" и сразу возвращаем обратно в центральное - курсор сдвинулся на одну строку
отклоняем переключатель в сторону "УВЕЛИЧЕНИЯ длины импульса" и сразу возвращаем обратно в центральное - вы входите в нужный пункт меню или выполняете действие
=====================================================================================================
Помогите разъяснить несколько вопросов по работе поворотного механизма наземной станции, точнее по ее установке на поле.
1. устанавливаем поворотку, пофиг в каком положении и куда направлена, хоть в запаркованном, подаём на неё питание...
2. самолёт желательно запитать непосредственно рядом с повороткой
3. дождаться нахождения спутников и фиксации базы... иногда база фиксируется слишком быстро и не совсем точно, 5-7 метров... я в этом случае запоминаю базу руками ещё раз через OSD меню...
4. отнести самолёт в любую сторону метров на 20-30
5. подойти к наземке и настроить направление антенны(азимут) на самолёт, можно через меню наземки, можно просто повернув штатив с антенной... я пользуюсь меню и подключенным внешним резистором, так удобнее
всё, наземка готова к полёту.
если всё время летаю из одного места, стараюсь и наземку ставить так же. в этом случае корректировки получаются минимальными...
отвечая на вопрос - если после этого ходить вокруг наземки на том же расстоянии 20-30 метров, антенна должна следить за самолётом...
=========================================================================================================
как обычно, отвечу на все вопросы.
Уважаемые господа, попрошу в комментах только техническую информацию,
я не хочу чтобы и тут было полно трёпа как в теме о Питлаб...
Не обижайтесь если кого отмодерю...
0 комментариев
Нет комментариев для отображения
Создайте аккаунт или войдите в него для комментирования
Вы должны быть пользователем, чтобы оставить комментарий
Создать аккаунт
Зарегистрируйтесь для получения аккаунта. Это просто!
Зарегистрировать аккаунт
Войти
Уже зарегистрированы? Войдите здесь.
Войти сейчас